
 data, and battery management systems)){kind=link}
Courtesy: Analog Devices
Mobile robots consist of various technologies that must communicate with each other quickly and reliably to transmit critical messages for navigation and performing tasks, whether it’s an Autonomous Mobile Robot (AMR) or an Automated Guided Vehicle (AGV). Let’s consider the architecture of an AMR as shown:
There are several components that make up any mobile robot (such as wheel drive & encoder systems, vision inputs, inertial measurement unit (IMU) data, and battery management systems), and all of them need to communicate, usually with a main controller or main compute unit or sometimes to decentralized units that control specific functions of the robot, which can be done to reduce the overhead on a main controller and also aid in time critical applications such as perception of its environment and actuator control. There are many communication methods that live within the operation of a typical mobile robot, and each type of protocol has their pros and cons for use. In the above example there are potentially 7 different communication methods employed within the one mobile robot: GMSL, UART, CAN, Ethernet, RS-485, SPI, RS-422. While this blog focuses on wired communication protocols, it is important to note that mobile robots typically require wireless communication as well. Wireless communication is essential for enabling mobile robots to interact with a base station and collaborate with other robots, ensuring seamless coordination and operation in dynamic environments.
Here is a quick comparison of a selection of technologies comparing their speed and latency.
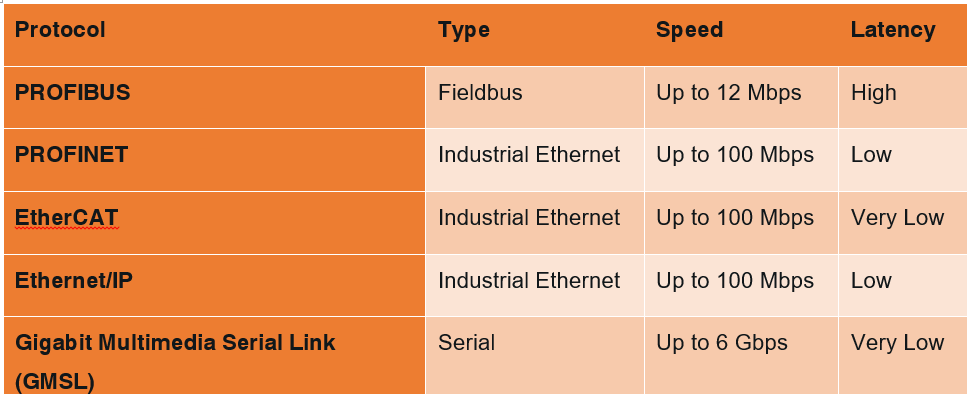
As it can be seen in table 1, the parameters for the highlighted technologies vary in speed and latency and the appropriate technology needs to be chosen according to the need and the design itself and will most likely include a combination of different technologies. Operations in mobile robots typically demand near real-time speeds to function effectively. This is crucial for tasks such as obstacle avoidance, navigation, and interaction with dynamic environments, where even slight delays can impact performance and safety. The key parameters that need to be taken into consideration for communication are performance, reliability, and scalability.
An AMR needs to be able to navigate while perceiving its surroundings to execute tasks in an efficient way, and a simple flow diagram can describe how it acts:
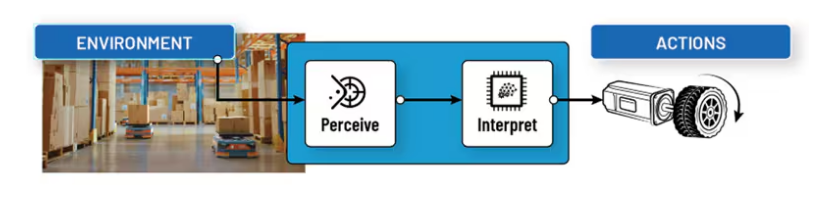
Both the perception and the action parts play important roles, the environment needs to be perceived in order for actions to be taken and this data is usually acquired with RGB cameras, depth cameras, Lidar sensors and radar or a combination but transferring all this data to a processing unit needs a robust link with enough bandwidth and in the case of industrial robots, reliability against interferences. That critical work can be executed by protocols such as GMSL.
Gigabit Multimedia Serial Link
There is a new protocol entering the mobile robotics scene, GMSL. The protocol can transfer up to 6 Gbps of advanced driver assistance systems (ADAS) sensor data over a coax cable while simultaneously transferring power and control data over a reverse channel. It is a highly configurable serializer deserializer (SERDES) interconnect solution which supports sensor data aggregation (Video, LiDAR, Radar, etc.), video splitting, low latency and low bit error, and Power over Coax (PoC)
The topology for a GMSL application consists of the sensor, a serializer, a cable, and a deserializer on the system on chip (SoC) side.
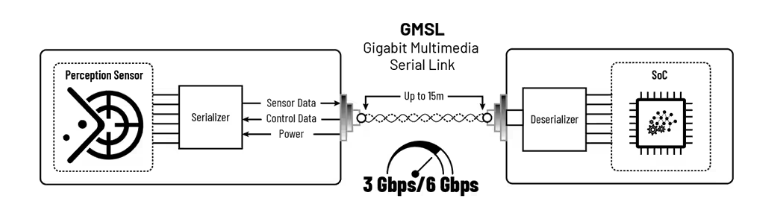
This simplifies the mobile robot design and makes it more robust since GMSL was designed with transferring this type of data and was optimized to ensure high bandwidth, low latency transmission of data.
The synergy between Industrial Ethernet, GMSL, and wireless communication technologies is driving the next generation of mobile robotics. These technologies provide the robust, high-speed, and flexible communication necessary for mobile robots to operate autonomously and efficiently in various environments. As innovations continue to emerge, the capabilities of mobile robots will expand, revolutionizing industries and transforming our daily lives.