
){kind=link}
R&D Vision Includes Adapting Wireless Technology for Drones and Robots in Factories
CEA-Leti today announced a new R&D initiative to contribute to a higher level of vehicle automation and cooperation by expanding the latest developments in vehicular wireless communications that improve reaction time, pedestrian detection and overall vehicle performance.
Combining learnings from its participation in three EU H2020 projects, CEA-Leti scientists have consolidated the institute’s expertise in vehicle-to-everything (V2X) communication technologies and standards. Their focus includes evaluating and demonstrating connected and cooperative vehicular systems to improve automation and help ensure the safety of vulnerable road users, such as pedestrians, workers and cyclists.




“The ultimate goal of our ongoing work is to help our partners in the automotive and related industries understand and adopt the benefits of V2X cooperative communications for improved safety, efficiency and automation performance,” said Benoît Denis, research scientist on radio localization and project manager at CEA-Leti.
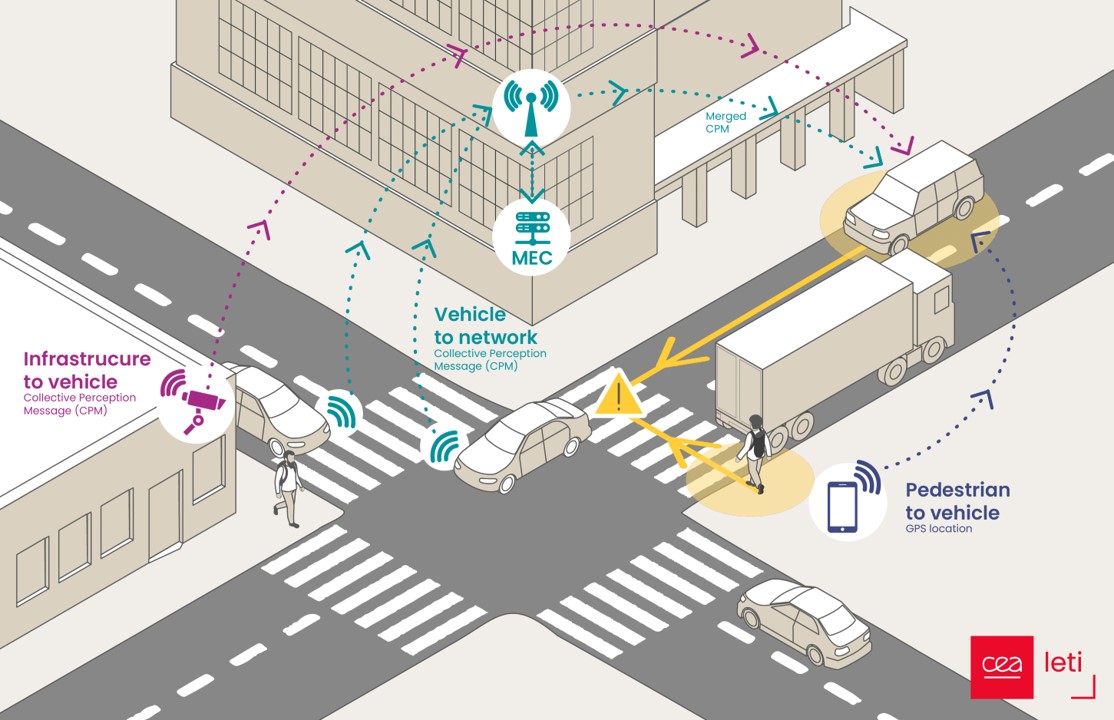
The H2020 studies included integrating a dedicated simulation flow for system-level evaluation of different short- and long-range radio technologies, such as IEEE802.11.p/bd, C-V2X sidelink or 5G-NR. They also investigated different architecture and infrastructure options, including roadside units, 5G base stations and MEC servers.

“Most important, a simulation tool the team developed was used to measure the actual impact of observed communication network performance in terms of latency, link reliability, coverage and load, on the critical vehicular applications,” explained Valérian Mannoni, research scientist on communication protocol and project manager at CEA-Leti. “These include service availability and continuity, level of automation allowed, time to collision and other primary key parameters.”
Denis said that while V2X communication technologies and protocols were initially developed to improve road safety through cooperation, the growing use of autonomous fleets of collaborative robots and drones raises similar research questions and challenges in a variety of complex mobile operating contexts.
“The cooperative communication approaches developed for vehicles could therefore also be used for collision avoidance and cooperative maneuvers by autonomous robots in smart factories,” he said.