

{kind=link}
As robots are gradually introduced into various real-world environments, developers and roboticists will need to ensure that they can safely operate around humans. In recent years, they have introduced various approaches for estimating the positions and predicting the movements of robots in real-time. Researchers at the Universidade Federal de Pernambuco in Brazil have recently created a new deep learning model to estimate the pose of robotic arms and predict their movements. This model is specifically designed to enhance the safety of robots while they are collaborating or interacting with humans.
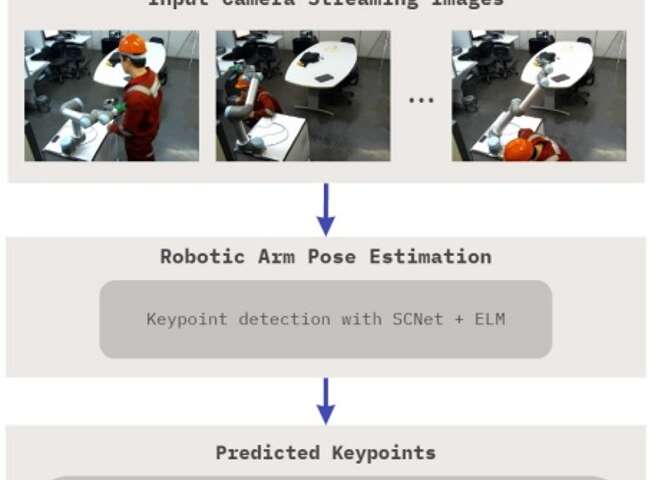
“Motivated by the need to anticipate accidents during human-robot interaction (HRI), we explore a framework that improves the safety of people working in close proximity to robots,” Djamel H. Sadok, one of the researchers who carried out the study, told TechXplore. “Pose detection is seen as an important component of the overall solution. To this end, we propose a new architecture for Pose Detection based on Self-Calibrated Convolutions (SCConv) and Extreme Learning Machine (ELM).”





Estimating a robot’s pose is an essential step for predicting its future movements and intentions, and in turn, reducing the risk of them colliding with objects in its vicinity. The approach for pose estimation and movement prediction introduced by Sadok and his colleagues has two key components, namely a SCConv and an ELM model.
The SCConvs component improves their model’s overall spatial and channel dependencies. The ELM approach, on the other hand, is known to be an efficient approach to classifying data.
“We observed that there were no existing studies that combine these two technologies in the context of our application,” Sadok explained. “Hence, we decided to see if such a combination improves our application. We also improved the framework by applying movement prediction, considering the pose detection, using recurrent neural networks (RNN).”
First, Sodok and his colleagues compiled a custom dataset containing images of scenes in which a robotic arm is interacting with a nearby human user. To create these images, they specifically used UR-5, a robotic arm created by Universal Robots.